DOI:10.29111/ijlrst ISRA Impact Factor:3.35, Peer-reviewed, Open-access Journal

Research Paper Open Access
International Journal of Latest Research in Science and Technology Vol.3 Issue 1, pp 1-8,Year 2014
Correspondence should be addressed to :
Received : 12 February 2014; Accepted : 19 February 2014 ; Published : 28 February 2014

| Download | 125 |
|---|---|
| View | 179 |
| Article No. | 10246 |
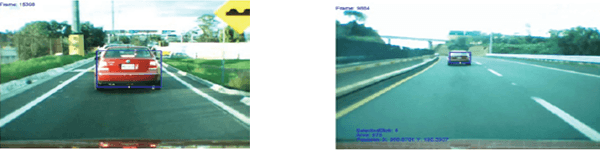
This paper presents the design of a driver assistance system based on computer vision that provides information about the environment and the vehicle’s current driving state. The system has been developed to be implemented on an embedded computation platform. Physical limitations such as memory and computing power are a major concern; this renders existing image processing algorithms based on PC platforms unsuitable for direct use in this application. Instead, simplified and efficient image processing algorithms must first be developed for deployment on a reconfigurable architecture. The driver assistance system provides three main functionalities: Lane Detection, Lane-Change Detection and Obstacle Detection. The core algorithms have been realized as custom hardware co-processors to be executed on Field Programmable Gate Array (FPGA) hardware, a soft-core CPU performs general system control and final decision making based on co-processor output.
Copyright © 2014 Ricardo Acevedo et al. This is an open access article distributed under the Creative Commons Attribution 4.0 International (CC BY 4.0) license which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Ricardo Acevedo, Miguel Gonzalez,Andres Garcia , " A Computer Vision-based Driver Assistance System For Implementation On Reconfigurable Hardware ", International Journal of Latest Research in Science and Technology . Vol. 3, Issue 1, pp 1-8 , 2014

MNK Publication was founded in 2012 to upholder revolutionary ideas that would advance the research and practice of business and management. Today, we comply with to advance fresh thinking in latest scientific fields where we think we can make a real difference and growth now also including medical and social care, education,management and engineering.

We offers several opportunities for partnership and tie-up with individual, corporate and organizational level. We are working on the open access platform. Editors, authors, readers, librarians and conference organizer can work together. We are giving open opportunities to all. Our team is always willing to work and collaborate to promote open access publication.

Our Journals provide one of the strongest International open access platform for research communities. Our conference proceeding services provide conference organizers a privileged platform for publishing extended conference papers as journal publications. It is deliberated to disseminate scientific research and to establish long term International collaborations and partnerships with academic communities and conference organizers.